
Institut für Robotik und Autonome Systeme
Was machen wir?
Unser Institut für Robotik und Autonome Systeme konzentriert sich auf die Anwendung von maschinellem Lernen in der Robotik und Automation sowie die Integration von Cloud-Technologien in autonome Robotersysteme.
In unserem hochmodernen Robotiklabor betreiben wir Forschung und Praxis auf zwei Etagen. Unser Team setzt sich aus Doktoranden, akademischen Mitarbeitern und Studierenden verschiedener Fakultäten zusammen. Bei IRAS verfolgen wir das Ziel einer fakultätsübergreifenden Zusammenarbeit, um Ideenaustausch zu fördern, Innovationen voranzutreiben und eine kollaborative Arbeitskultur zu etablieren.
Wo sind wir?
Der Standort von IRAS befindet sich auf dem modernen Modellcampus HKA 2030+
im Technologiepark. Hier wird die Vision verfolgt, neue Wege der fakultätsübergreifenden Zusammenarbeit zu schaffen und zukunftsorientiertes Arbeiten zu fördern. Ganz getreu dem Motto Space for creative engineers.
Aktuelles
-

IRAS beim 4. MINT-Festival Karlsruhe: CrêpeBot begeistert erneut
Über 1.000 Besucher, sommerliche Hitze und eine lange Schlange am Stand: Beim 4. MINT-Festival Karlsruhe war IRAS zum dritten Mal in Folge mit dem CrêpeBot dabei und zeigte Mensch-Roboter-Kollaboration zum Anfassen.
mehr erfahren -
EDULEARN26: ein Paper vom IRAS in Palma, Mallorca
Wie wird aus einem Wettbewerbssieg ein nachhaltiges Lehrkonzept? Caroline Haun hat auf der EDULEARN2026 in Palma de Mallorca ein zyklisches Modell vorgestellt, das Robotik-Wissen von der Hochschule bis in die Schule trägt.
mehr erfahren -

Konsortialtreffen des Interreg-Projekts an der FHNW
Am 15. April traf sich das Konsortium des Interreg-Projekts zu seinem letzten gemeinsamen Präsenztreffen bei den Projektpartnern der Fachhochschule Nordwestschweiz (FHNW) in der Schweiz.
mehr erfahren -

Promotion erfolgreich abgeschlossen: Dr. Moritz Weisenböhler
Herzlichen Glückwunsch an Moritz Weisenböhler zu erfolgreichen Promotion. In seiner Dissertation „Transfer Learning mit synthetischen Daten für Bildverarbeitungssysteme in der industriellen Kommissionierung“ untersuchte er, wie KI-basierte Automatisierungslösungen in Industrie und Logistik effizient mit Trainingsdaten versorgt werden können.
mehr erfahren -

Interreg Begleitausschuss zu Gast am IRAS
Über 40 Mitglieder des Interreg Begleitausschusses besuchten am 3. März 2026 das IRAS und informierten sich über die Fortschritte des grenzüberschreitenden Projekts Robot Hub. Neben Präsentationen zu den Bereichen Transfer und Academie standen eine Laborführung und interaktive Demonstrationen auf dem Programm. Das Feedback fiel durchweg positiv aus.
mehr erfahren -
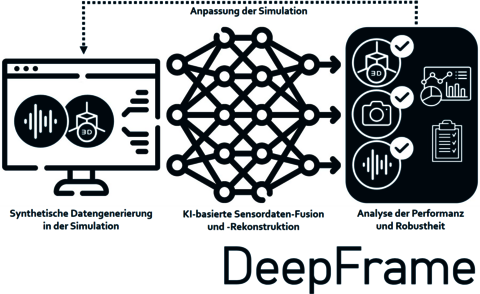
Wie Maschinen das Sehen lernen: Forschungsprojekt DeepFrame macht Künstliche Intelligenz alltagstauglich
Konsortium aus Industrie entwickelt gemeinsame mit der Hochschule Karlsruhe (IRAS) robuste KI-Systeme – Training mit virtuellen Welten statt teurer Realdaten. Lesen Sie jetzt die aktuelle Pressemitteilung.
mehr erfahren -

Newsupdate: Ein besonderer Meilenstein für das IRAS: Unsere erste Promotion!
Herzlichen Glückwunsch an Dr. Gergely Sóti zu erfolgreich abgeschlossenen Promotion! Ein besonderer Meilenstein, nicht nur für ihn sondern auch für unser junges Institut. In seiner Arbeit - Robotic Grasping via Implicit Policies on Neural Radiance Fields - zeigte Gergely, wie neuronale Szenenrepräsentation (NeRFs) weit über klassische Wahrnehmungsaufgaben hinaus genutzt werden können: Sie ermöglichen es, robotische Greifbewegungen direkt, kontinuierlich und geometrisch fundiert zu optimieren, ein wichtiger Beitrag für die Weiterentwicklung lernbasierter Manipulation.
mehr erfahren -

Erneuter Sieg für die HKA auf der Upper Rhine Mobile Robotics Challenge 2025
Das HKA-Team triumphiert bei der Upper Rhine Mobile Robotics Challenge 2025: Nach intensiven Vorbereitungswochen, technischen Hürden und großer Teamleistung sicherten sich die Studierenden den ersten Platz.
mehr erfahren -

Recap zum UR FUTUR Festival 2025 in Straßburg, Frankreich
Das IRAS war gemeinsam mit seinen Partnern aus dem gemeinsamen Forschungsprojekt Interreg Robot Hub Academie auf der UR FUTUR 2025 in Straßburg vertreten, um eines der Projektergebnisse, den >Robotic Compass<, vorzustellen.
mehr erfahren -

IROS 2025: Gemeinsames Paper mit dem Institut für Robotik und intelligente Produktionssysteme in Hangzhou, China
IROS 2025 - Yongzhou Zhang präsentierte das Paper „QBIT: Quality-Aware Cloud-Based Benchmarking for Robotic Insertion Tasks“. Die Arbeit behandelt ein Benchmarking-Framework für roboterbasierte Fügevorgänge, das neben der Erfolgsrate auch Qualitätsmetriken wie Krafteintrag, Kraftverlauf und Ausführungszeit bewertet. Um realitätsnahe Ergebnisse zu erzielen, nutzt QBIT parametrisierte Simulationen, Mesh Dekomposition, ROS2-Containerisierung und eine skalierbare Kubernetes-Intrastruktur.
mehr erfahren -
Mit Robotik und Begeisterung in die Zukunft: IRAS auf den Science Days 2025
Roboter steuern, autonome Fahrzeuge programmieren, Zukunftstechnologie hautnah erleben: Vom 23. bis 25. Oktober 2025 brachte das IRAS bei den Science Days im Europa-Park Rust jungen Besuchern die faszinierende Welt der Robotik näher. Mit Spot und Duckietown-Fahrzeugen wurde Technik zum Erlebnis – und Begeisterung geweckt.
mehr erfahren -

ARSO 2025: ein Paper vom IRAS in Osaka, Japan
Unser Kollege Andreas Zachariae präsentierte auf der ARSO 2025 in Osaka seine Forschung zur robotergestützten Rehabilitation. Im Mittelpunkt stand das Framework RoboTrainerAID, das mithilfe von KI individuelles und adaptives Bewegungstraining ermöglicht – ein wichtiger Beitrag angesichts Fachkräftemangel und demografischem Wandel.
mehr erfahren -

Halbzeit-Treffen im Projekt "Interreg Robot Hub" - Erfolgreiches Konsortialtreffen im Rhein Business Center Strasburg
Am 13.Mai 2025 hatten wir unser Halbzeit-Treffen von Interreg Robot Hub mit den Teilprojekten Robot Hub Transfer und Robot Hub Academie. Das Konsortium hat sich bei unseren Partnern, der Industrie- und Handelskammer Alsace Eurométropole (CCI Alsace Eurométropole), mitten in der Altstadt von Straßburg getroffen und die Ergebnisse der letzten eineinhalb Jahre präsentiert. Das Projekt ist in beiden Teilbereichen voll auf Kurs und leistet einen enormen Beitrag für die Region am Oberrhein.
mehr erfahren -
Doppelsieg für die HKA bei der Upper Rhine Mobile Robotics Challenge 2024
Die Upper Rhine Mobile Robotics Challenge 2024 war ein voller Erfolg für die Hochschule Karlsruhe! Als einzige nicht-französischen Teams setzten sich unsere Studierenden gegen starke Konkurrenz aus Frankreich und dem Elsass durch – und sicherten sich gleich beide ersten Plätze.
mehr erfahren -

Mit drei Papern auf der CASE 2024 in Bari, Italien
Ende August war ein Teil unseres Teams sowie unsere Kollegen von Proximity gemeinsam auf der CASE2024 in Bari, Italien. Dort präsentierten sie ihre unterschiedlichen Paper und tauschen sich mit der versammelten Community zu aktuellen Fragestellungen in der Forschung sowie auftretenden Herausforderungen aus und konnten neue Inspiration für die eigene Forschung zu finden.
mehr erfahren -

Gemeinsam für mehr MINT-Begeisterung
Am 12. September 2024 fand an am IRAS die erste Netzwerkveranstaltung zur MINT-Begeisterung statt. Ziel war es, den Austausch zwischen den verschiedenen MINT-Projekten der Hochschule Karlsruhe zu fördern, Synergien aufzudecken und eine intensivere Zusammenarbeit zu ermöglichen. Die Veranstaltung brachte verschiedene Akteure aus unterschiedlichen Bereichen zusammen und legte den Grundstein für eine zukünftige, hochschulweite Vernetzung im MINT-Bereich.
mehr erfahren -

KATE - Promotionskolleg Zugänglichkeit durch KI-basierte Assistenztechnologien
Die Graduiertenschule KATE ist eine neue kooperative und interdisziplinäre Graduiertenschule zwischen der Hochschule Karlsruhe (HKA) und dem Karlsruher Institut für Technologie (KIT). Das Ziel des Promotionsprogramms ist es, die Autonomie und Teilhabe von Menschen mit Behinderungen durch den Einsatz von Assistenzsystemen auf Basis Künstlicher Intelligenz (KI) zu verbessern. Derzeit forschen zwei unserer IRAS-Mitarbeiter an KATE-Projekten.
mehr erfahren -
Best Paper Award Runner Up für Gergely Soti
Unser wissenschaftliche Mitarbeiter, Gergely Soti, gewinnt den Best Paper Award Runner Up für seinen Artikel mit dem Titel "Gradient based Grasp Pose Optimization on a NeRF that Approximates Grasp Success" auf der "The 18th Internation Conference Conference on Intelligent Autonomous Systems 2023". Projekt: KI5GRob
mehr erfahren -

IRAS Team auf der IAS-18
Unsere wissenschaftlichen Mitarbeiter Luisa Hornung, Philipp Augenstein, Gergely Soti, Moritz Weisenböhler und Andreas Zachariae nahmen der Konferenz "The 18th International Conference on Intelligent Autonomous Systems" und stellten Ihre Forschungsergebnisse in vier Veröffentlichungen vor. Projekte: KI5GRob, PeTRA, QualiTED, Tourings
mehr erfahren -

Publikation auf der IROS angenommen
Der Artikel "Reachability-aware Collision Avoidance for Tractor-Trailer System withNon-linear MPC and Control Barrier Function" unseres wissenschaftlichen Mitarbeiters Yucheng Tang wurde auf der renommierten IEEE Konferenz IROS angenommen. Projekt: PeTRA
mehr erfahren -

Robotik mit KI-Unterstützung in der industriellen Anwendung
Eindrücke aus der Innovationsallianz: Neueste Entwicklungen aus der Karlsruher Forschungslandschaft im Bereich Robotik Das Team der Forschungsgruppe iRAS um Prof. Dr. Ing-Björn Hein demonstrierte an einer Greifaufgabe, wie Roboter durch Vormachen programmiert werden
mehr erfahren
Schüler-Angebote
Im Rahmen von unserem EU-Projekt “Interreg Robot Hub Academie” engagieren wir uns am IRAS für die MINT-Förderung (im speziellen Robotik-Förderung) bei
Kindern und Jugendlichen. Unser Ziel ist es, den Wissenschaftlern von morgen die Vielfalt von MINT und Robotik näher zu bringen und durch schon frühen Kontakt Vorbehalte und Skepsis abzubauen.
Wenn Sie auf der Suche nach dem passenden Workshop, Ferienprogramm oder
AG-Ausflug sind, dann schauen Sie gerne in unsere Terminübersicht oder melden sich mit konkreten Anfragen bei unseren Kollegen.