
Institut für Robotik und intelligente Produktionssysteme
Laufende Projekte

PIPE
In PIPE werden Methoden erforscht, die es Robotersystemen ermöglichen, sich auf neue Aufgaben im produktionstechnischen Umfeld flexibel anzupassen. Hierbei wird ein Repräsentationslernmodul entwickelt, welches das Lernen von Kontaktmodellen durch Einbindung von Vorwissen in Form von Geometrie, Material und DGL ermöglicht. Über das geschätzte Kontaktmodell kann dann die Kraftregelung mit traditionellen Methoden der Reglersynthese automatisiert ausgelegt und zum Fügen genutzt werden.
ISASDeMoRo
Im Projekt ISASDeMoRo werden innovative Technologien zur Autonomiebildung erforscht, die es Robotersystemen erlauben Montage- und Demontageoperationen selbstständig durchzuführen. Hierzu wird ein feinfühliges Sensor-Aktor-System entwickelt, welches es ermöglicht Prozessgrößen, wie Kräfte und Momente sowie Kameradaten zu erfassen, diese zu fusionieren und hochdynamisch regelnd auf das Sensor-Aktor-System und den Roboter einzuwirken. Mittels Repräsentationslernen werden verschiedene Montageoperationen generalisierend modelliert, sodass die einzelnen Fähigkeiten auf verschiedene, bestehende und neue Robotersysteme und Prozesse modular übertragbar sind. Das Einrichten des Prozesses erfolgt über symbolische Anweisungen, sodass kein Expertenwissen notwendig ist und somit der zeit- und kostenintensive Anteil einer Automatisierung nahezu entfällt. Die Kombination aus hoher Prozessdynamik und Generalisierung durch Repräsentationslernen, gepaart mit einfacher Parametrierung des Prozesses, könnte die aktuellen Hemmnisse zum wirtschaftlichen Einsatz von Robotersystemen in der Montage und Demontage überwinden und so einen Wettbewerbsvorsprung in der Produktionstechnik durch autonome Robotik einleiten.

KIDWAP
Die zunehmende Komplexität moderner Fahrzeuge mit bis zu 180 Steuergeräten stellt die Automobilindustrie vor erhebliche Herausforderungen bei der digitalen Wertschöpfung. Prozesse wie ECU-Flashen, individuelle Konfiguration und Fahrzeuginbetriebnahme erfordern die präzise Beachtung komplexer Abhängigkeiten, Reihenfolgen und Randbedingungen. Traditionelle, manuelle Ansätze zur Prozessmodellierung und Qualitätssicherung stoßen bei der wachsenden Variantenvielfalt und steigenden Produktionskomplexität an ihre Grenzen. Das Projekt basiert auf einer dreistufigen, integrierten Methodik, die künstliche Intelligenz systematisch zur Analyse und Optimierung der digitalen Wertschöpfung in der Automobilproduktion einsetzt. Diese Methodik kombiniert datengetriebene Prozessmodellierung, generative KI-Technologien und intelligente Anomalieerkennung zu einem kohärenten Lösungsansatz.

MERLIN
Aktuelle Verfahren im Bereich des maschinellem Lernens nutzen immer größere Modelle und benötigen hierdurch bedingt immer größere Rechenkapazitäten, was neben dem Energiebedarf auch die Trainings- und Inferenzzeit stark erhöht. Durch die Nutzung moderner, analoger Computerarchitekturen können dies Defizite jedoch reduziert werden.
MERLIN beschäftigt sich mit den Potentialen von analogen Computern in den Bereichen der Robotik und des Maschinellen Lernens. Neben der Umsetzung von klassischen Steuerungsalgorithmen werden künstliche neuronale Netze mittels analoger Technik umgesetzt.
PATTERN
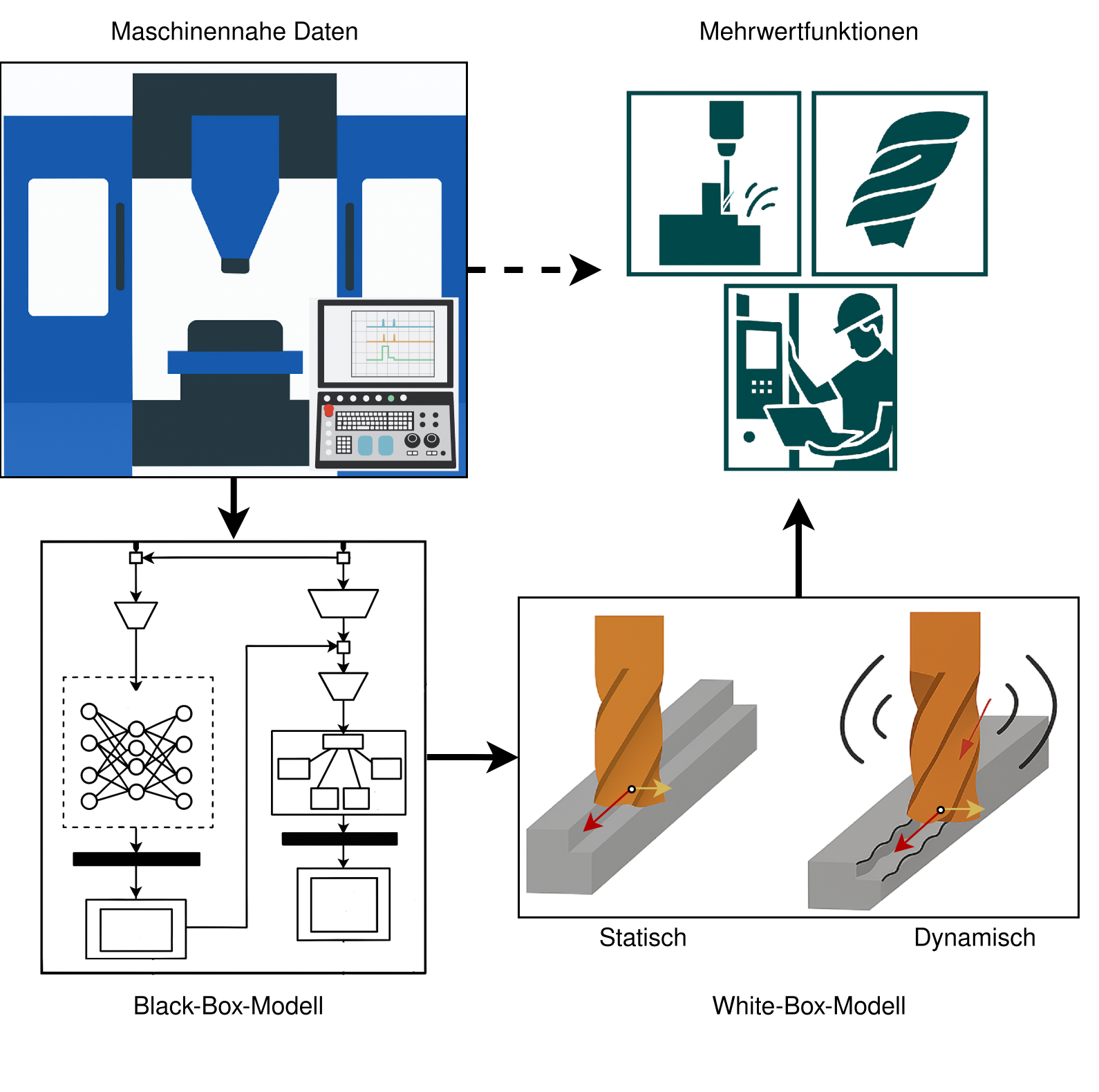
Im Projekt PATTERN wird die Rekonstruktion von Prozesskräften in der zerspanenden Fertigung auf Basis von Werkzeugmaschinendaten untersucht. Das Ziel besteht darin, physikalische Modelle mit datengetriebenen Methoden zu kombinieren, um eine zuverlässige Schätzung der Prozesskräfte zu ermöglichen.
Der hybride Ansatz aus KI und Physik steigert die Dateneffizienz, die Generalisierbarkeit und die Interpretierbarkeit. Ein besonderer Fokus liegt darauf, Modelle zu entwickeln, die mit vorhandenen Werkzeugmaschinendaten und Metadaten trainiert werden. So entsteht nicht nur eine Lösung für einzelne Anwendungen, sondern es wird ein umfassendes Verständnis von Maschinen und Prozessen erreicht.
Damit die Technologie industriehnah validiert werden kann, arbeitet PATTERN eng mit den Partnern ISG Industrielle Steuerungstechnik GmbH und Lorenz Hoffmann GmbH zusammen, wodurch die Wertschöpfungskette vom Steuerungshersteller bis zum Endanwender betrachtet wird. Auf dieser Basis können zukünftig Maschinen-Mehrwertfunktionen, die auf der Vorhersage der Prozesskräfte basieren, erforscht werden, bspw. die Optimierung der Schnittdaten, die Vorhersage von Verschleiß und die Prognose von Ratterbildung.
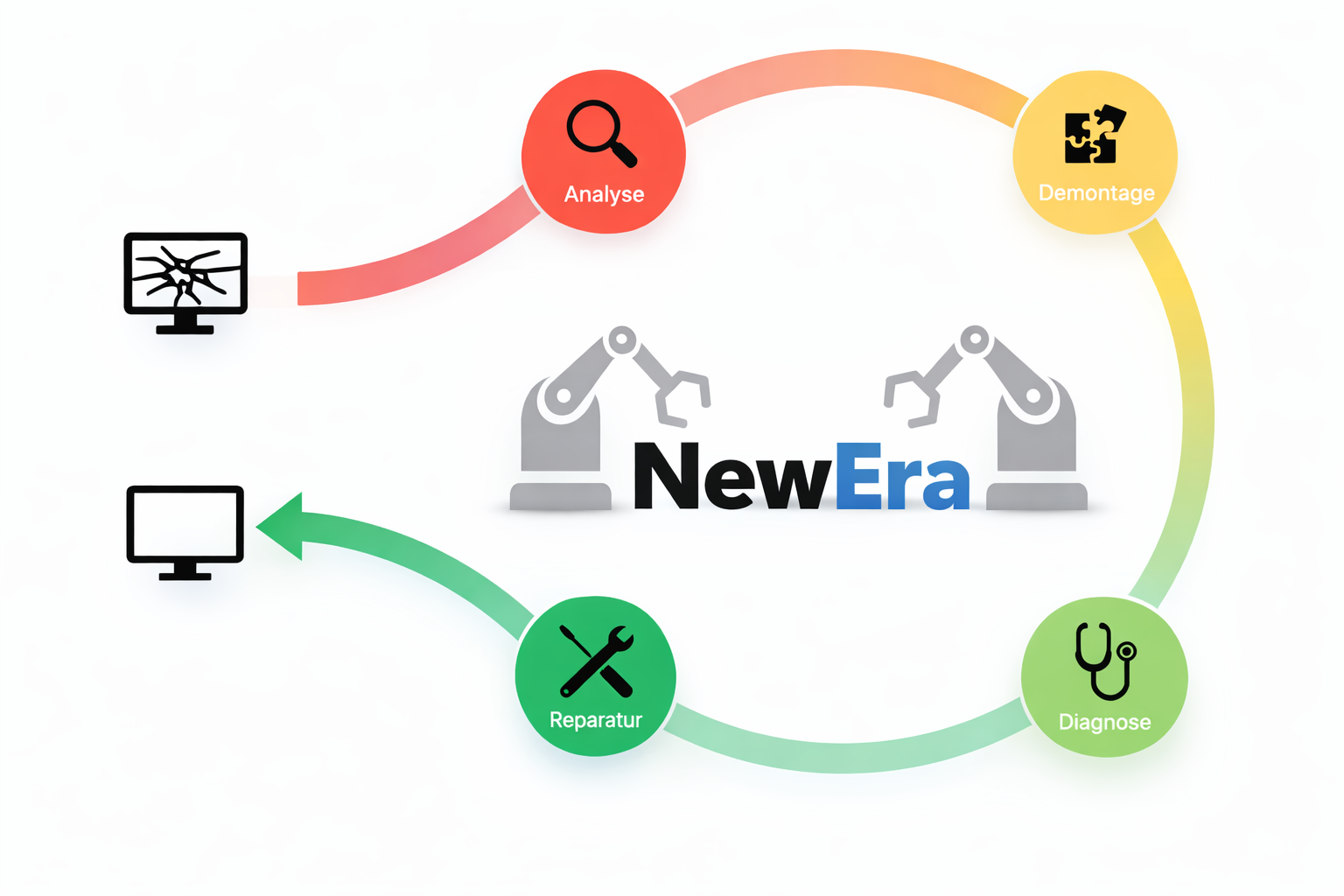
NewEra
Angesichts des steigenden Bedarfs an Elektronik, der zunehmenden Menge an Elektroschrott sowie der Tatsache, dass viele Rohstoffe knapp und nur mit hohem Aufwand zu gewinnen sind, wird die zirkuläre Kreislaufwirtschaft immer bedeutender. Trotzdem werden die wenigsten Elektrogeräte repariert, obwohl oft einfache Defekte zugrunde liegen. Einerseits sind Reparaturen oft unwirtschaftlich, da Arbeits- und Ersatzteilkosten den Gerätewert übersteigen. Andererseits fehlt aufgrund des demografischen Wandels zunehmend qualifiziertes Fachpersonal. Ziel dieses Vorhabens ist daher die Entwicklung einer Methodik zur automatisierten Reparatur von Elektrogeräten sowie deren prototypische Umsetzung in einem Technologiedemonstrator. Hierfür wird ein Dual-Arm-Manipulator mit KI-gestützter Fehlerdiagnose und adaptiven Greifsystemen zur flexiblen De-/montage- und Reparatursequenzplanung eingesetzt. Zusätzlich entsteht eine skalierbare Reparaturdatenbank, die Expertenwissen strukturiert abbildet. Der Demonstrator soll abschließend alle wesentlichen Prozessschritte zeigen und bietet somit die Grundlage für die zukünftige Etablierung von automatisierten Reparaturlösungen.
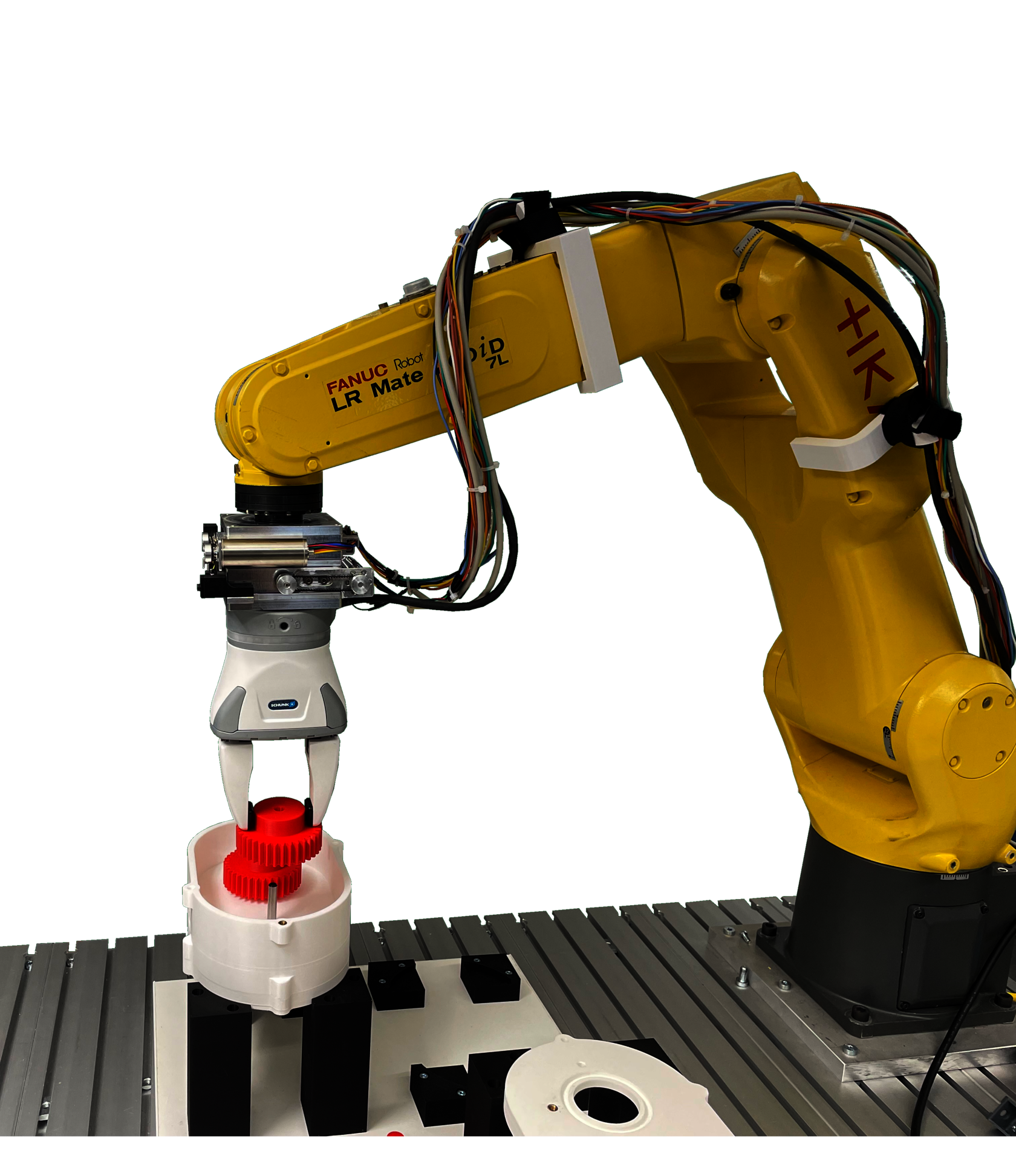
GSAK
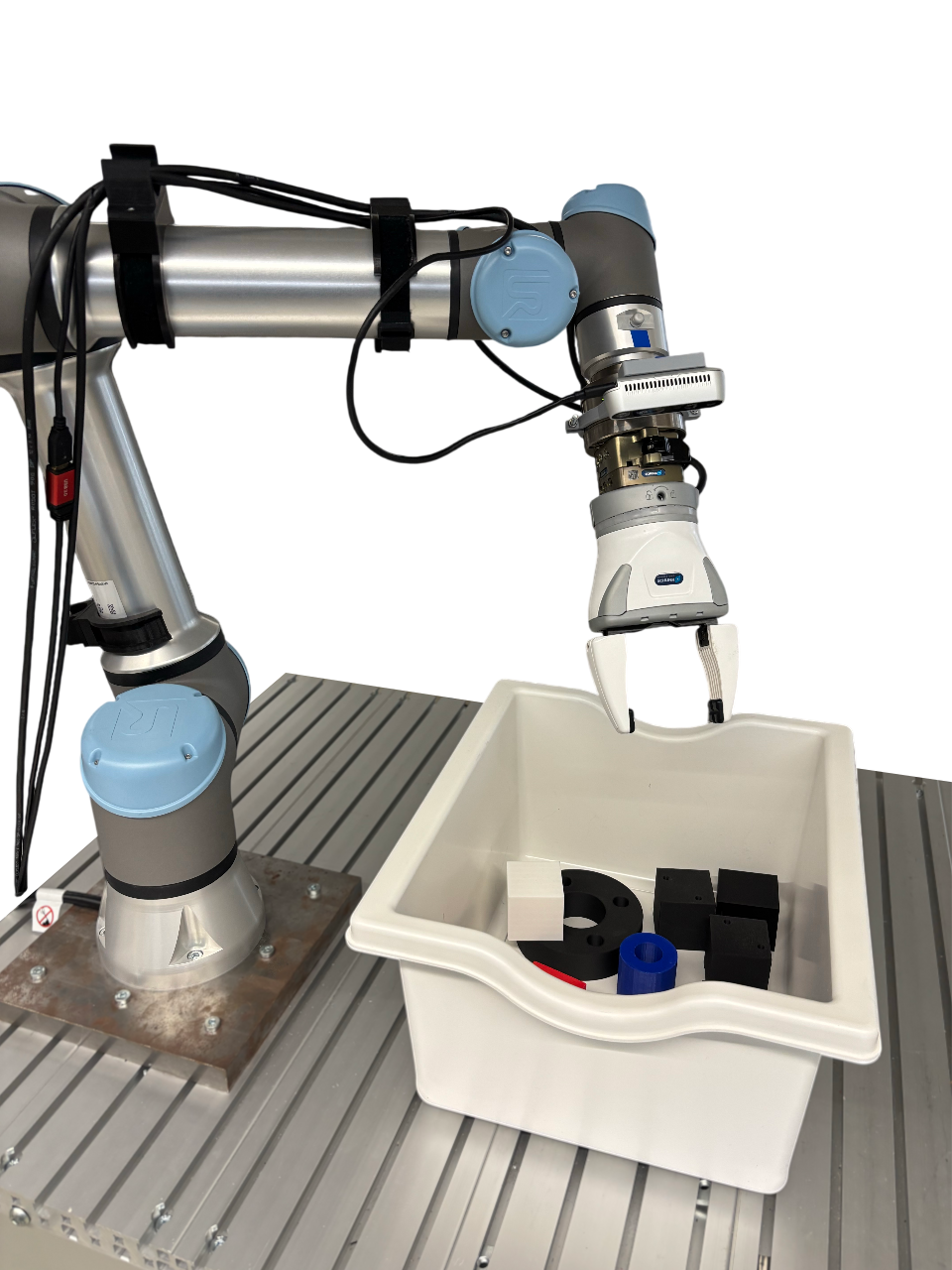
Die zunehmende Automatisierung von Montageprozessen sowie die steigende Produktindividualität erfordern intelligente und autonome Greifsysteme für Industrieroboter. Das Projekt GSAK erforscht hierzu neuartige Greifplanungsstrategien mit besonderem Fokus auf die Handlung, die von Objekten in nachgelagerten Prozessen angeboten werden. Zentrale Grundlage sind sogenannte Affordances, die beschreiben, welche Objektbereiche für spezifische Handlung relevant sind. Dadurch können Greif-Hypothesen stabil und handlungsorientiert generiert werden. Hierfür werden Deep-Learning-basierte Verfahren mit Heuristiken erweitert, die die Generalisierung und Effizienz des Lernens verbessern. Dabei müssen vor allem Strategien entwickelt werden, die das Greifen auch in komplexen und beengten Szenarien erlauben, in denen zur erfolgreichen Erfüllung der Aufgabe, Kollisionen mit benachbarten Objekten erforderlich sind.
Abgeschlossene Projekte

iTENDO
Das Projekt iTENDO erforscht innovative Methoden zur Verarbeitung von Schwingungsdaten in der spanenden Fertigung. Ziel ist es, zentrale Prozesszustände wie Werkstückqualität, Werkzeugverschleiß oder Rattern zuverlässig vorherzusagen.
Besonderer Wert wird auf die industrielle Anwendbarkeit der entwickelten Technologien gelegt. In Kooperation mit dem Unternehmen SCHUNK wurde dafür der intelligente Werkzeughalter iTENDO eingesetzt. Dieses Sensor-System ermöglicht eine besonders prozessnahe und nicht-invasive Erfassung von 1D-Beschleunigungsdaten – direkt am Werkzeug. So lassen sich bestehende Werkzeugmaschinen einfach nachrüsten und die erarbeiteten Technologien praxisnah testen.
Ein Schwerpunkt liegt auf der datenbasierten Zustandsvorhersage mithilfe moderner Signalverarbeitung und KI. Zum Einsatz kommt unter anderem eine Kombination aus Short-Time Fourier Transformation (STFT), automatischer Merkmalsextraktion über eine Transformer-inspirierte CNN-Architektur sowie ein LSTM-Modell zur Klassifikation der Prozesszustände.
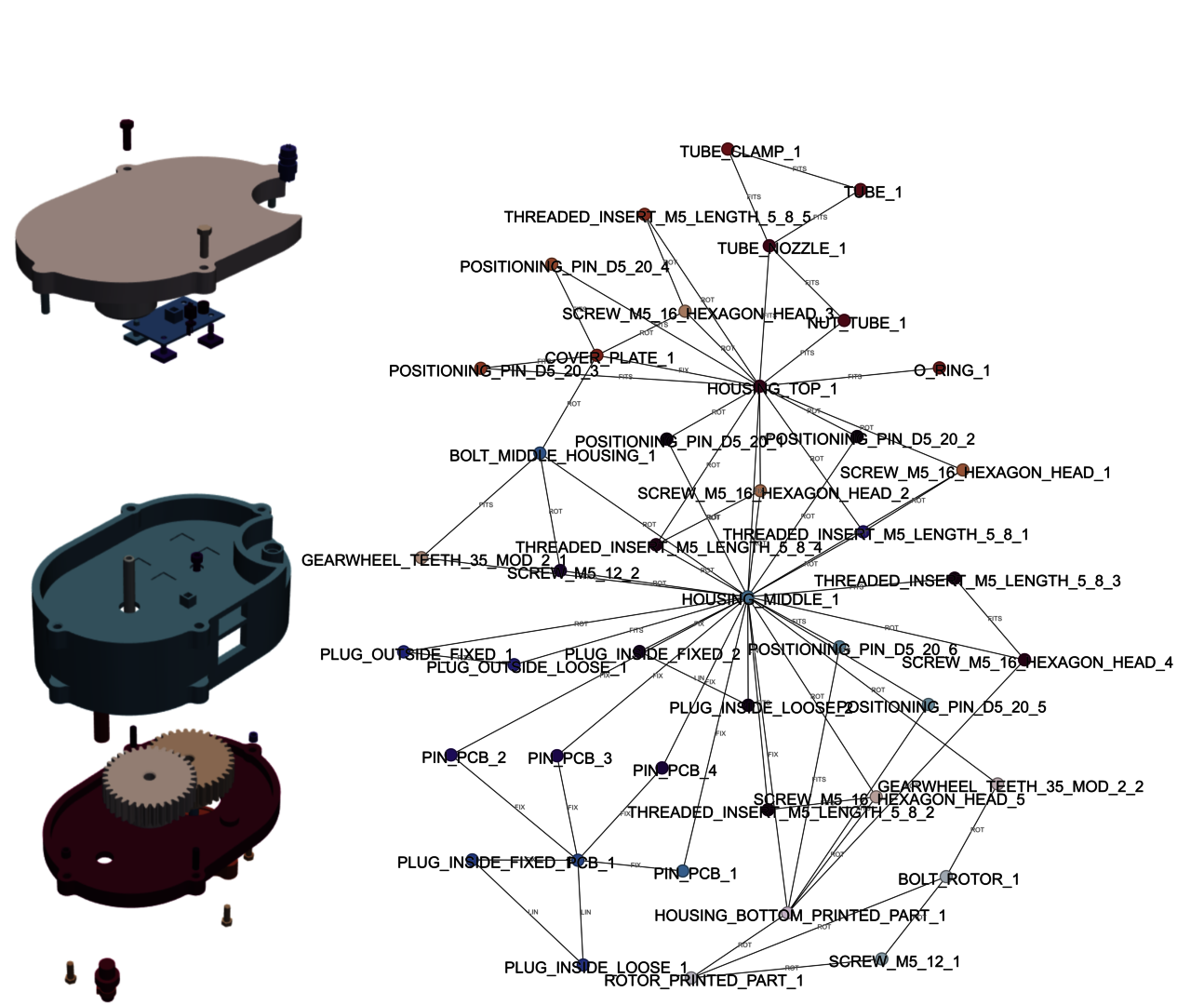
ADeMoRos
Ziel des Projekts ist die Entwicklung intelligenter Softwareservices, die Robotersysteme in die Lage versetzen, auf Basis von CAD- und Umweltdaten eigenständig Montage- und Demontageprozesse zu planen und auszuführen. Angesichts steigender Anforderungen an Ressourceneffizienz und Automatisierung soll eine durchgängige, autonome Lösung entstehen – ohne manuelle Programmierung. Hierzu werden neuartige Algorithmen entwickelt, die symbolische KI-Verfahren mit datengetriebenen Methoden kombinieren: Während symbolische Ansätze Transparenz und physikalische Modellintegration ermöglichen, reduzieren datenbasierte Verfahren die Komplexität bei schwierigen Aufgabenstellungen. Die generierten Abläufe werden automatisiert in Roboterprogramme überführt und in eine modulare Softwarearchitektur integriert. So entsteht ein flexibles System, das autonome, kooperative Roboterinteraktionen für Montage und Demontage ermöglicht.