ISASDeMoRo | Intelligentes Sensor-Aktor-System für die autonome Demontage und Montage durch Robotersysteme
Laufendes Projekt 07/2023 – 06/2026
Motivation
Angesichts einer wachsenden Produktvielfalt bei gleichzeitig sinkenden Losgrößen rücken automatisierte Lösungen für Montage- und Demontageprozesse verstärkt in den Fokus industrieller Forschung und Entwicklung. Besonders im wirtschaftsstarken Bundesland Baden-Württemberg, in dem das produzierende Gewerbe maßgeblich zur Bruttowertschöpfung beiträgt, ergibt sich ein dringlicher Bedarf an hochflexiblen und zugleich wirtschaftlich einsetzbaren Automatisierungstechnologien. Der Einsatz konventioneller Robotersysteme ist in diesem Kontext bislang limitiert, da diese eine unzureichende Wandelbarkeit, einen hohen Aufwand für Parametrierung und Programmierung sowie eine eingeschränkte Dynamik bei kontaktreichen Manipulationen aufweisen. Parallel dazu gewinnt die Demontage, insbesondere unter dem Aspekt der Ressourcenschonung und Kreislaufwirtschaft, zunehmend an Relevanz. Vor diesem Hintergrund ist die Entwicklung innovativer, adaptiver Automatisierungslösungen für Montage- und Demontageprozesse von zentraler Bedeutung.
Gesamtziel
Im Forschungsprojekt ISASDeMoRo sollen innovative Technologien zur Autonomiebildung erforscht werden, die es Robotersystemen erlauben Montage- und Demontageoperationen selbstständig durchzuführen und somit den Automatisierungsgrad, gerade in kleinen- und mittleren Unternehmen, zu steigern.
Methodik
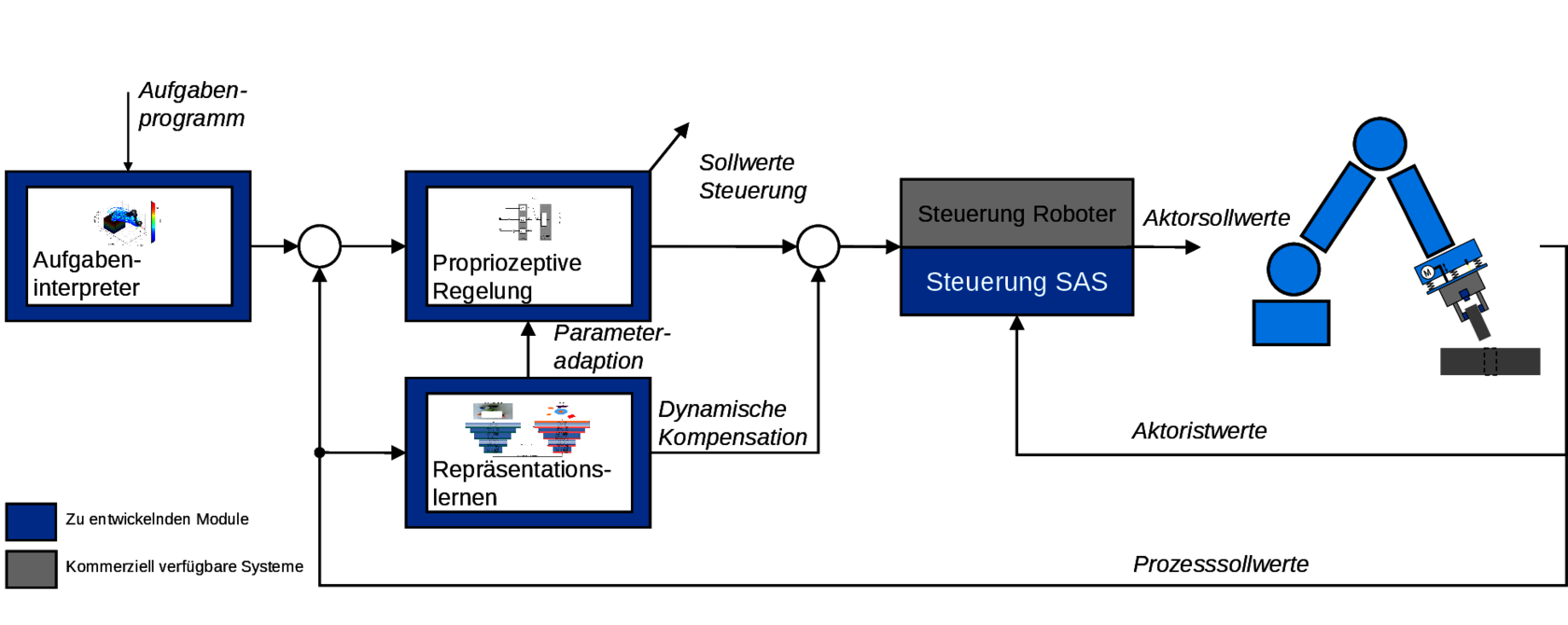
Ziel ist die Entwicklung eines intelligenten Sensor-Aktor-Systems (SAS), das in der Lage ist, prozessrelevante Größen wie Kräfte, Momente und visuelle Informationen (z. B. RGBD-Kameradaten) präzise zu erfassen, diese multimodal zu fusionieren und darauf basierend hochdynamisch regelnd auf sowohl das SAS selbst als auch das übergeordnete Robotersystem einzuwirken. Durch den Einsatz von Repräsentationslernen werden Montageoperationen generalisiert modelliert, sodass sich die erlernten Fähigkeiten modular auf unterschiedliche Robotersysteme und Prozessvarianten übertragen lassen. Die Prozesskonfiguration erfolgt über symbolische Aufgabenbeschreibungen, wodurch aufwendige Expertenprogrammierung entfällt und die Inbetriebnahme signifikant vereinfacht wird. Die Wirksamkeit des entwickelten Gesamtsystems wird anhand realer industrieller Anwendungsfälle experimentell validiert.
Projektpartner
Projektförderung
Das Projekt ISASDeMoRo wird im Rahmen des Programms Autonome Robotik der Baden-Württemberg Stiftung gefördert.