MERLIN | Dynamic Exteroceptive Robot Control using Analog Computing
Laufendes Projekt 02/2025 – 05/2027
Motivation
Im Zuge des Fortschritts von "Industrie 4.0" steigen auch die Ansprüche und Erwartungen an die Individualisierbarkeit von Produkten. Mit der Zunahme der Produktanforderungen steigt auch die erforderliche Komplexität der Produktionslinien. Adaptive Fertigungsprozesse erfordern die Möglichkeit einer dynamischen Reaktion des Systems auf sich ändernde Prozessparameter. Hierzu zählen etwa Änderungen an Bauteilen oder deren Positionierung. Zur Erfüllung dieser Anforderungen werden vermehrt maschinelle Lernkonzepte in Produktionsanlagen integriert. Insbesondere im Kontext von sensorgestützten Arbeitsschritten ist der Einstieg aufgrund der hohen Komplexität und des erforderlichen Kenntnisstands herausfordernd. Im Bereich der Sensorik und intelligenten Robotik sind bereits Komplettlösungen auf dem Markt verfügbar. Allerdings weisen diese Modelle speziell bei der Verarbeitung visueller Signale eine eingeschränkte Dynamik auf, was zu einer erhöhten Prozesszeit führt. In diesem Kontext bietet die Verwendung von analoger Rechentechnik deutliche Vorteile.Die Differentialgleichungen, welche den jeweilgen Algorithmen zugrunde liegen, können mittels elektrischer Schaltungen nachgebildet und somit engergie- und zeitsparend berechnet werden. Bisherige analoge Computer waren durch ihre geringen Rekonfigurationsfähigkeit und Flexibilität stark eingeschränkt. Diese Nachteile sollen nun mittels neuer hybrider analog-digital Computer ausgeglichen werden und die somit gewonnenen Vorzüge im Kontext der Robotik und des maschinellem Lernens genutzt werden.
Gesamtziel
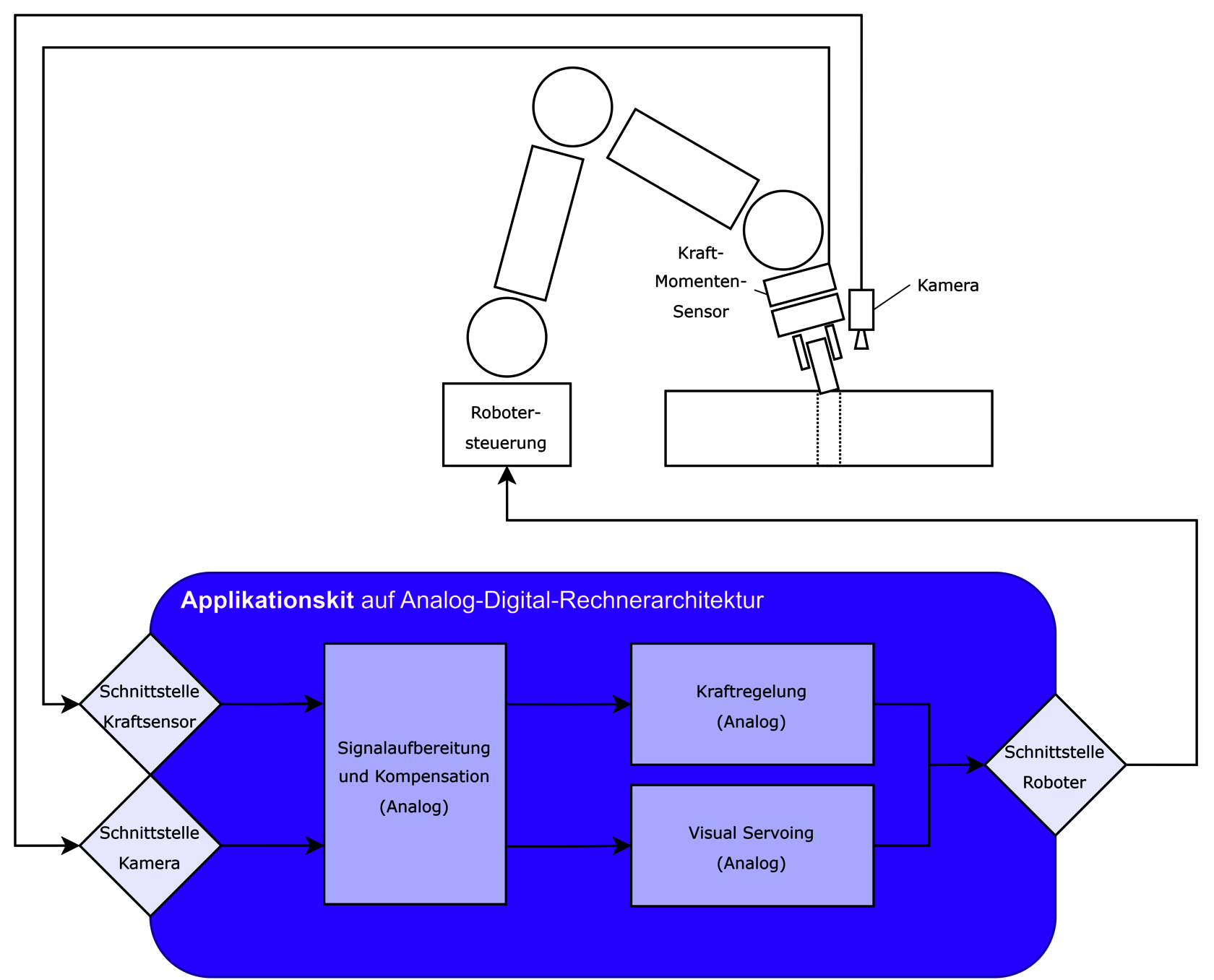
Das Ziel des Forschungsprojekts ist die Entwicklung von Steuer- und Regelungsverfahren auf Basis eines Analogrechners zur hochdynamischen Regelung von Robotern durch exterozeptive Sensorik. Dabei soll ein ganzheitliches Applikationskit für Robersysteme entwickelt werden, welches die SW für die Steuerungs- und Regelungsverfahren umfasst, die auf einem Analog-Digital-Rechner deployed werden können, welcher mit den jeweiligen Schnittstellen angepasst ist, sodass sowohl Sensorik als auch Robotersteuerung an diesen angeschlossen werden können. Durch diesen ganzheitlichen Ansatz kann insbesondere die Dynamik in der Ausführung maßgeblich gesteigert werden, was bis heute eines der maßgeblichen Hindernisse in der Verbreitung von robotergeführten Demontage und Montageapplikationen darstellt.
Methodik
Zur Regelung des Robotersystems werden multiple Reglerstrukturen mittels der Darstellung als Differenentialgleichungssystem umgesetzt und softwareseitig implementiert. Neben bereits bestehenden klassischen Ansätzen wie beispielsweise einer Impedanz- oder Admittanzregelung, werden auch Ansätze des maschinellem Lernens wie Convolutional Neural Networks in die analoge Domäne überführt. Die Umsetzung als elektrischer Schaltkreis ermöglicht insbesondere bei der Verwendung einer visuellen Regelung eine deutliche Verringerung der Inferenzzeit, wodurch die Dynamik des Gesamtsystems erhöht werden kann. Durch die direkte Nutzung kontinuierlicher Sensorsignale und die Ausgabe kontinuierlicher Steuerungssignale können bisher als diskrete Aufgaben betrachtete Regelungsprobleme mit einer erhöhten Genauigkeit und einem geringen Phasenverschiebung berechnet und ausgeführt werden.
Projektpartner
Projektförderung
Das Projekt MERLIN wird im Rahmen des Zentralen Innovationsprogramm Mittelstand (ZIM) durch das Bundesministerium für Wirtschaft und Energie gefördert.