Mechatronics Competition Team beim 12. Carolo-Cup 2019 erfolgreich
Mit ihrem bislang ausgereiftesten autonomen Modellfahrzeug, dem "C.A.F.Ka", konnte sich das Hochschul-Team in Braunschweig erneut auszeichnen

13. Februar 2019
"Ziel des traditionsreichen Wettbewerbs ist die Entwicklung und Programmierung eines autonomen Modellfahrzeugs im Maßstab 1:10, das selbständig auf der Straße fahren, einparken, an Kreuzungen halten und Hindernissen ausweichen kann. Was wie Spielzeugautos aussieht, sind in Wirklichkeit High-Tech-Autos. Das jetzige Fahrzeug ist das beste autonome Modellfahrzeug, das das Mechatronics Competition Team bisher erstellt hat", fasst Prof. Dr.-Ing. Ferdinand Olawsky, Studiendekan Mechatronik (Bachelor) und Leiter des Mechatronics Competition Team (MCT) der Fakultät für Maschinenbau und Mechatronik (MMT) die Ergebnisse des zum 12. Mal von der Technischen Universität Braunschweig organisierten "Carolo-Cups" - an dem das MCT im Bereich Basic-Cup den fünften Platz belegte - zusammen.
Prof. Olawsky betont, "dass schon allein die Teilnahme an so einem anspruchsvollen Wettbewerb eine enorme Herausforderung darstellt, so dass die Endplatzierung fast zweitrangig ist". Das im diesjährigen Wettbewerb eingesetzte Fahrzeug wird seit ca. zwei Jahren entwickelt. Insgesamt waren in diesem Zeitraum über 40 Studierende der Studiengänge Mechatronik, Fahrzeugtechnologie, Elektrotechnik und Maschinenbau beteiligt.
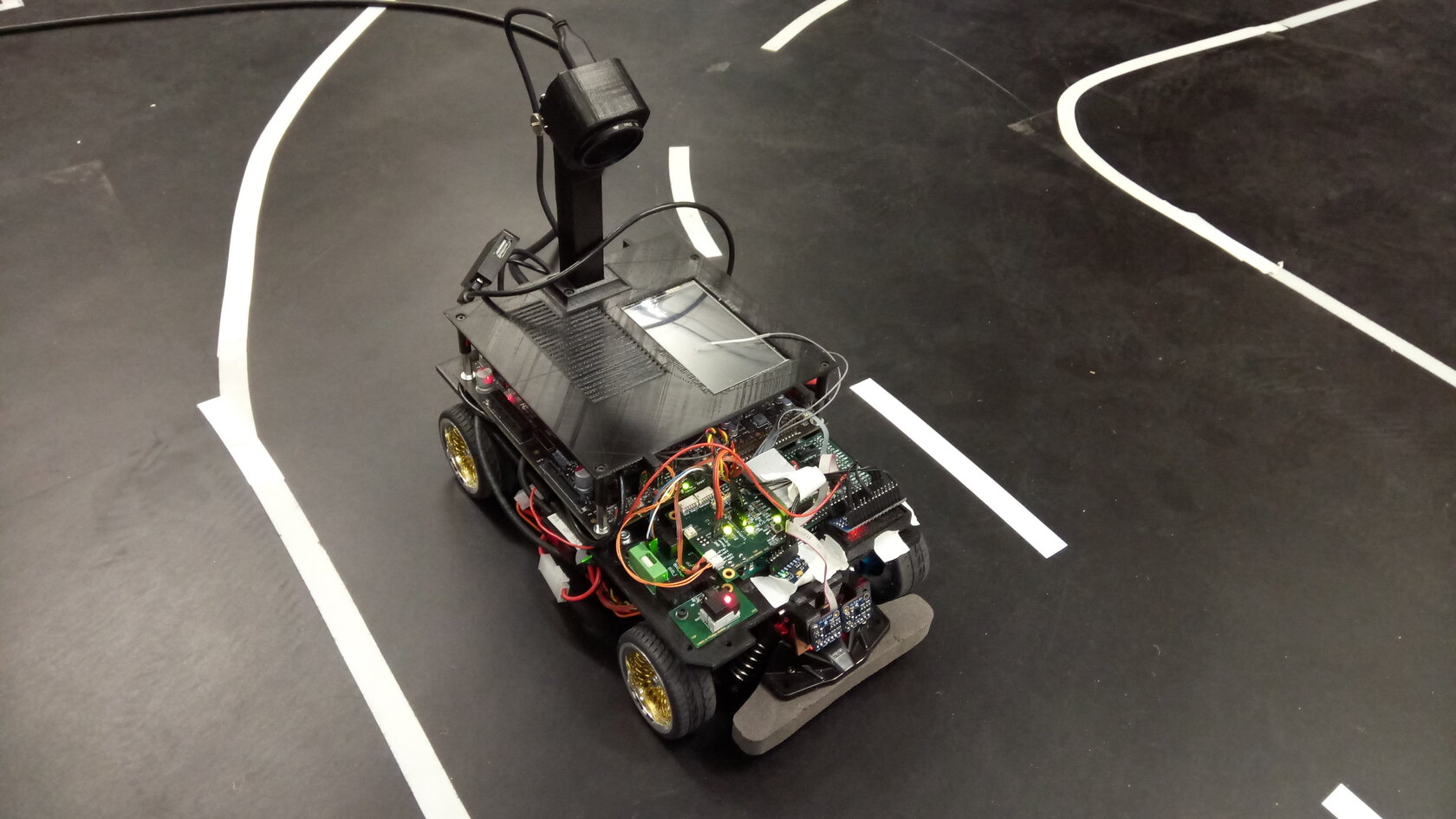
Beim Wettbewerb gab es drei Disziplinen: In der statischen Disziplin musste das Team in einer Präsentation das Fahrzeug sowie die Konzepte für autonome Fahrzeuge einer Fachjury vorstellen. In zwei dynamischen Disziplinen musste das Fahrzeug autonom auf der Straße fahren, einparken und Hindernissen ausweichen. Die zentrale Steuereinheit ist ein Arduino Mega, der von einem zusätzlichen Arduino Nano bei der Kommunikation mit Sensoren und LEDs entlastet wird. Die von einer Kamera aufgenommenen Bilder der Straße werden auf einem Nvidia Jetson TX2 Board mit OpenCV und CUDA schnell verarbeitet, um aus den Bildern den Lenkwinkel und die Fahrgeschwindigkeit für das Fahrzeug zu ermitteln. Abstandssensoren dienen der Hinderniserkennung auf der Straße und der Kollisionsvermeidung beim Einparken.