Motivation
In view of the growing variety of products and simultaneously decreasing batch sizes, automated solutions for assembly and disassembly processes are increasingly becoming the focus of industrial research and development. Especially in the economically strong state of Baden-Württemberg, where the manufacturing industry makes a significant contribution to gross value added, there is an urgent need for highly flexible and at the same time economically viable automation technologies. The use of conventional robot systems has been limited in this context thus far because they are not versatile enough, require extensive parameterization and programming, and have limited dynamics for high-contact manipulations. At the same time, disassembly is becoming increasingly relevant, particularly in terms of resource conservation and the circular economy. In this context, developing innovative, adaptive automation solutions for assembly and disassembly processes is of central importance.
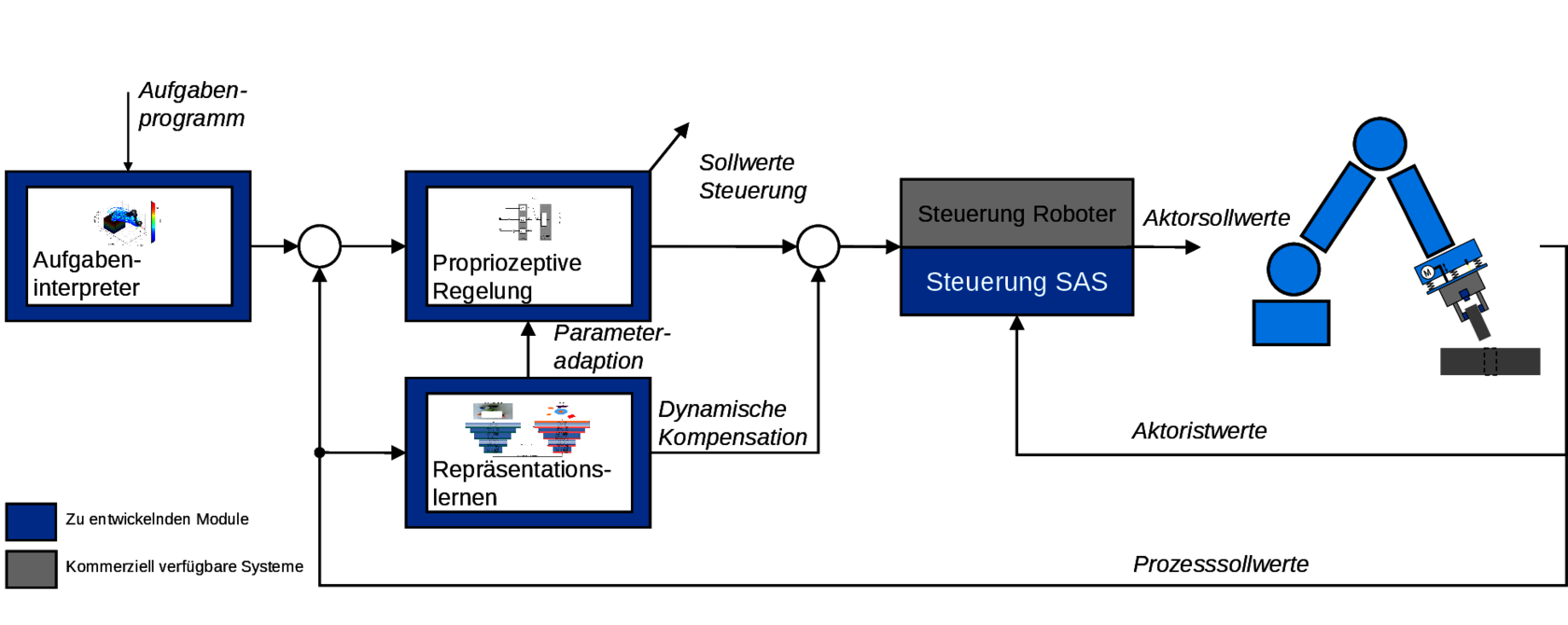
The aim is to develop an intelligent sensor-actuator-system (SAS) that is able to precisely record process-relevant variables such as forces, torques and visual information (e.g. RGBD camera data), fuse them multimodally and, based on this, exert highly dynamic control effects on both the SAS itself and the higher-level robot system. By using representation learning, assembly operations are modelled in a generalized way so that the skills learned can be transferred to different robot systems and process variants on a modular basis. The process configuration is carried out using symbolic task descriptions, which eliminates the need for time-consuming expert programming and significantly simplifies commissioning. The effectiveness of the overall system developed is validated experimentally using real industrial use cases.
Project funding
The ISASDeMoRo project is funded as part of the Baden-Württemberg Foundation 's Autonomous Robotics program.